Принцип работы эхолотов
Прижившееся у нас название «эхолот» хорошо отражает заложенный в основу прибора принцип: «эхо» – отраженный звук, и «лот» – пришедший к нам из глубины веков измеритель глубины. Вместе это получается как «измеритель глубины с использованием отраженного звука».
Для реализации данного принципа в состав эхолотов входят четыре основных элемента – передатчик, приемник, преобразователь (часто встречаются названия «датчик», «излучатель», «тран-дюсер», «гидроакустическая антенна», которыми мы также будем пользоваться) и устройство отображения результатов поиска.
Передатчик вырабатывает следующие через определенные интервалы времени высокочастотные импульсы. В эхолотах обычно используются частоты от несколько десятков до нескольких сотен кГц. В настоящее время в современных любительских эхолотах применяются частоты 50 и 200 кГц, иногда встречается частота 192 кГц.
Излучаемые преобразователем звуковые сигналы распространяются в воде со скоростью около 1500 м/сек. и отражаются от дна, рыб, водорослей, камней и пр. предметов (Рис. 1). Достигшие до преобразователя эхо-сигналы возбуждают в нем электрические импульсы, которые затем усиливаются в приемнике, выделяются из шумов и поступают в дисплей.
В дисплее осуществляется преобразование результатов зондирования в удобную для восприятия графическую или алфавитно-цифровую форму для отображения на экране прибора.

Рис. 1. Принцип работы эхолота
Устройство и характеристики эхолотов
Дисплей
Дисплей используется для отображения результатов ультразвукового зондирования и управления работой прибора. Для этого на нем имеется жидкокристаллический монохромный или цветной экран и клавиатура (рис. 2).
Для получения изображения подводного пространства под судном на экране используется развертка (иногда используется другое название – прокрутка). Быстрая вертикальная развертка на правой стороне экрана дает текущую (мгновенную) картину под судном.
Каждый принятый приемником эхо лота отраженный сигнал отображается на экране в виде темной точки или вертикальной полосы, отстоящей от линии поверхности на расстоянии, пропорциональной глубине отражающего объекта.
Отображение подводного пространства под судном в координатах «глубина – время» осуществляется посредством медленной горизонтальной развертки, передвигающей текущее изображение влево по экрану. Таким образом, создается запомненная на время прохождения экрана картина того, что происходило под водой во время зондирования.
Если судно неподвижно, то дно будет отображаться в виде горизонтальных полос, а попадающие в луч излучателя рыбы в виде отметок (о них речь пойдет позже), перемещающихся влево вместе с разверткой.
При движении судна изображение дна будет изменяться соответственно изменениям глубины. При этом для наглядности картины, скорость развертки должна соответствовать скорости движения судна – для этого в большинстве эхолотов имеется возможность ее регулировки.
В связи с таким способом получения изображения необходимо понимать, что находящаяся на экране картина – это прошлое событие. Так, находящаяся на экране отметка рыбы означает не то, что она в данный момент находится под судном в луче излучателя, а то, что она какое-то время назад была там. Для того чтобы видеть, что происходит непосредственно под судном в момент наблюдения, во многих моделях эхолотов вдоль правого края экрана создается окно, в котором отображение производится без горизонтальной развертки.

Рис. 2. Внешний вид эхолота
Преобразователи
Преобразователь является важнейшим элементом эхолота, во многом определяющим его характеристики. Он преобразует энергию электрических высокочастотных импульсов в ультразвуковые колебания и, в то же время, производит обратное преобразование отраженных ультразвуковых сигналов в электрические сигналы.
По способу преобразования электрической энергии в звуковую существуют несколько видов преобразователей – электромагнитные, магнитострикционные и пьезоэлектрические. На малых судах в силу их малых размеров прижились только последние.
Основным элементом пьезоэлектрического преобразователя является кристалл титаната бария (встречаются кристаллы и из других материалов) цилиндрической формы с нанесенными на его поверхности металлическими покрытиями. Такой кристалл помещается в металлический или пластиковый корпус и заливается хорошо проводящим звук компаундом.

Рис. 3. Диаграмма излучения преобразователя
Под воздействием приложенного к рабочим поверхностям кристалла переменного электрического поля в нем возникают упругие колебания, в результате чего кристалл начинает сокращаться и расширяться, вызывая возникновение волн в воде.
Отраженные от дна или каких-либо других подводных объектов волны, воздействуя на кристалл, вызывают появление на его рабочих поверхностях переменного напряжения, поступающего на приемник эхолота.
Принято считать, что преобразователь излучает и принимает звуковую энергию в пределах конуса. На самом деле «конус» – это лишь удобное для пользователей представление характеристики излучения. Реальная диаграмма излучения имеет многолепестковую структуру – главный лепесток, излучающий основную часть энергии, и ряд боковых лепестков (рис. 3).
Ширину диаграммы направленности («угол конуса») как электрических, так и акустических антенн, принято определять по половинному уровню мощности излучения. Этот угол при одинаковых размерах кристалла зависит от частоты – чем выше частота, тем уже конус.
Виды преобразователей
Используемые в рыбопоисковых эхолотах преобразователи различаются по следующим признакам:
– По составу данных, которые может поставлять преобразователь
– По материалу, из которого сделан корпус преобразователя;
– По количеству лучей;
– По месту установки преобразователя на судне.
Состав получаемых данных
Основное назначение преобразователя – получение сигналов о глубине объектов. Однако существуют преобразователи, в корпусах которых устанавливаются дополнительные датчики, позволяющие измерять и передавать в дисплей температуру воды и скорость судна.
Материал корпуса
Преобразователи изготавливаются из пластмасс или из металла – латуни или бронзы.
Пластмассовые корпуса обычно используются на судах с корпусами из металла или из стеклопластика. Пластмассовый преобразователь, установленный в деревянный корпус, может быть раздавлен при набухании дерева после спуска судна на воду.
Металлические преобразователи предназначены для установки на суда со стеклопластиковыми или деревянными корпусами. При установке бронзового преобразователя на металлический корпус может возникать электрохимическая реакция, разрушающая корпуса судна и преобразователя в месте их контакта. В преобразователях с металлическими корпусами могут устанавливаться датчики температуры воды и скорости.
Количество лучей
Какое-то время назад эхолоты в основном были однолучевыми. Сейчас они постепенно вытесняются из номенклатуры фирм-производителей двухлучевыми, причем их цена становится сопоставима с ценам однолучевых эхолотов. Два луча получаются за счет наличия двух частот – 50 и 200 кГц, поэтому эхолоты называют двухчастотными. Такие приборы могут работать как на одной из двух частот, так и одновременно на двух.
Существуют так же и экзотические модели производства фирмы Humminberd, в которых формируются три и шесть лучей – для расширения зоны просмотра в первом случае и для создания псевдотрехмерной картины во втором.
Способы установки преобразователя
Существуют три основных способа установки преобразователя – с внутренней стороны корпуса («in-hull»), на транце и на днище («Thru-hull»).
Рабочая частота
Глубина обнаружения подводных объектов и точность их различения при одинаковой мощности излучения зависит от частоты.
В выпускаемых ранее эхолотах использовались либо высокие (192 кГц – в эхолотах Lowrance и Eagle, 200 кГц – в эхолотах Garmin, Raymarine и др.) либо низкие – 50 кГц. В настоящее время, в связи с широким распространением двухчастотных эхолотов, остались лишь две частоты – 50 и 200 кГц, позволяющие использовать один кристалл для работы на двух частотах одновременно и порознь.
Как уже отмечалось, ширина диаграммы излучения обратно пропорциональна частоте излучения – чем выше частота излучения, тем уже конус, и тем самым выше плотность заключенной в нем звуковой энергии, а отсюда – большая глубина и лучшая способность обнаружения мелких объектов, более подробное отображение на экране.
При работе на низких частотах ширина конуса намного шире и, соответственно, плотность энергии в конусе меньше со всеми вытекающими отсюда последствиями. Но, с другой стороны, более широкая диаграмма излучения позволяет обнаруживать рыбу в более широкой зоне, чем при работе на высокой частоте.
Появление двухчастотных эхолотов позволило объединить достоинства каждой из частот в одном приборе и избавило покупателя от необходимости разрешать проблему выбора эхолота с широким или узким лучом. Современные двухчастотные (двухлучевые) эхолоты позволяют работать с одним из двух имеющихся лучей, а также с обоими сразу.
Фирмы-производители рыбопоисковых эхолотов обычно выпускают большое количество моделей преобразователей с различными углами излучения. Так, компания Garmin предлагает преобразователи на частоте 200 кГц с углами конуса от 8 до 20 градусов, на частоте 50 кГц – с углом 45 градусов. Двухлучевые эхолоты этого производителя имеют ширину луча 15 и 45 градусов. Примерно такие же показатели имеют преобразователи и других фирм. Следует отметить, что преобразователи производят и поставляют всем изготовителям эхолотов несколько специализированных фирм.
Эффективность эхолота
Эффективность работы преобразователя зависит от ряда факторов – от окружающей среды, от частоты, места расположения, скорости судна, характеристик прибора и многого другого. Влияние некоторых из них будет рассмотрено ниже.
Влияние среды распространения звука
Вода, являясь средой распространения созданных преобразователем ультразвуковых волн, оказывает существенное влияние на работу эхолота, поэтому знание особенностей прохождения волн в воде полезно владельцу для эффективного использования прибора.
На эффективность работы оказывают влияние следующие характеристики среды распространения:
1. Затухание энергии звуковых волн в воде;
2. Наличие отражений звуковых волн в воде. Затухание звуковой энергии в воде состоит из двух составляющих – затухание свободного пространства и затухание в среде распространения.
Затухание свободного пространства – это абстрагированное от среды распространения, зависящее только от дальности, ослабление звуковой энергии.
При активной гидролокации, когда звук проходит одно и то же расстояние дважды, затухание свободного пространства пропорционально четвертой степени глубины.
Затухание энергии звуковых волн в воде объясняется ее поглощением и рассеиванием находящимися в воде минеральными и органическими частицами, микроорганизмами и пузырьками воздуха.
Наименьшее затухание вносит пресная холодная вода – из-за низкой температуры она обладает более высокой плотностью и в ней находится минимум органики. В пресной воде с одинаковым успехом можно пользоваться эхолотами как с низкой, так и с высокой частотами излучения.
Соленая морская вода, напротив, содержит большое количество солей, планктона и минеральных частиц, особенно в хорошо прогретых верхних слоях моря, поглощающих и рассеивающих энергию звуковых волн. Значительное ослабление энергии в соленой воде вносят содержащиеся в ней пузырьки воздуха, возникающие при образовании ветровых волн.
Отражения в любой среде – в воде, в воздухе – образуются неоднородностями, отличными по плотности от среды. Ими могут быть какие-либо предметы (камни, грунт, рыба, растительность, воздушные пузыри), либо слои воды с разной температурой (так называемые термоклины, речь о которых пойдет позже). Здесь можно провести аналогию со стеклом – будучи прозрачным, оно отражает часть падающего на него света обоими поверхностями – границами перехода от малой плотности воздуха к большой плотности стекла и, наоборот – от большей плотности к меньшей.
В зависимости от перепада температур степень отражения волн может быть различной, вплоть до полного (чем пользуются подводники, уходя от сонаров противолодочных кораблей). На практике чисто зеркальное отражение встречается нечасто, обычно оно из-за неравномерности по глубине термоклина бывает диффузным, т.е. рассеянным. В глубоких водоемах может быть несколько тер-моклинов.
Если в пресной воде затухание звуковой энергии на разных частотах практически одинаковы, то в морской воде затухание и отражение от термо-клинов с ростом частоты увеличивается. Поэтому в эхолотах, предназначенных для поиска рыбы в море, используются частоты 50 кГц, а в некоторых профессиональных эхолотах для больших глубин применяется частота 28 кГц.
Отражающие свойства дна
Дно пресноводных водоемов и морей имеет неоднородную структуру, включающую разнообразные по плотности грунты – ил, песок, глину, каменную плиту, галечные россыпи, покрытые, как правило, разнообразной растительностью. Все эти виды грунтов имеют разную способность отражать и поглощать звуковые волны. Камни и глина хорошо отражают звуковые волны, создавая на экране широкую линию. Мягкие грунты – ил и песок, а также растительность плохо отражают волны, создавая на экране тонкую линию. В то же время мягкие грунты проницаемы для ультразвука, потому на экране эхолота можно наблюдать под ними более плотные подстилающие поверхности.
Влияние расположения преобразователя
Преобразователь с установкой внутри корпуса Преобразователи «in-hull» прикрепляются прямо к внутренней стороне корпуса судна. Они применяются только на судах с корпусом из стеклопластика. Преобразователи этого типа не подходят для судов с металлическим и деревянными корпусами, а также с многослойными стеклопластиковыми корпусами с пористым наполнителем.
Преобразователь «In-Hull» обычно крепится к стеклопластиковой обшивке с помощью эпоксидного клея. Применение пластичных герметиков для его крепления недопустимо из-за их плохой акустической проводимости. Преобразователи необходимо устанавливать так, чтобы между ними и водой была только обшивка корпуса без каких-либо усиливающих или повышающих плавучесть вставок.
При использовании преобразователя «In-hull» звуковые волны проходят через стеклопластиковую обшивку корпуса, теряя при этом часть энергии, в результате чего снижается максимальная глубина и возможность обнаружения рыбы.
Преобразователь с установкой на транец
Преобразователи этого типа (рис. 4.) используются, как правило, на небольших тихоходных судах.
Преобразователи этого типа устанавливаются на расположенный на транце специальный кронштейн ниже уровня воды. Конструкция кронштейна позволяет преобразователю откидываться при наезде на какое-либо препятствие, предотвращая тем самым повреждение преобразователя и транца.
Достоинства такой установки – простота монтажа, демонтажа и обслуживания. Недостаток – нахождение рядом с гребными винтами, вращение которых приводит к возмущениям воды, снижающим эффективность преобразователя. Если на малых оборотах еще можно найти подходящее место на транце, то на больших и скоростных судах работающие на больших оборотах винты создают сильное возмущение воды, насыщают воду пузырьками воздуха, которые экранируют преобразователь, практически исключая возможность работы.
Преобразователь с установкой на корпусе («Truehull»)
Устанавливаемые на корпус преобразователи типа «True Hull» (рис. 5) вставляются в отверстие, вырезанное в днище судна. Этот тип преобразователя обладает наилучшими характеристиками, но и наибольшей ценой. Они предназначены для установки на большие и скоростные суда с подвесными и стационарными двигателями. Размещаются обычно на плоской части днища перед винтами в местах с плавным обтеканием водой. Если судно имеет V-образные обводы, то для горизонтального расположения преобразователя используют специальные прокладки из пластмассы, что на большой скорости приводит к появлению кавитации и, соответственно, к снижению эффективности эхолота (о кавитации – см. ниже). Для улучшения обтекаемости излучателя существуют специальные обтекатели, снижающие турбулентность и кавитацию.

Рис. 4. Преобразователь с установкой на транец
Достоинством такого преобразователя является высокая эффективность, к недостаткам можно отнести сложность установки и обслуживания, необходимость регулярной очистки от обрастания водорослями.
Влияние скорости движения на работу преобразователя
Первыми с влиянием скорости на эффективность работы эхолота столкнулись военные моряки, использовавшие сонары на скоростных противолодочных кораблях.

Рис. 5. Преобразователь с установкой на корпусе
Перед рыбакам, профессионалами и любителями долгое время никаких проблем, связанных с использованием эхолотов на их судах, не возникало – скорости у тех и других были невелики. Но по мере роста скоростей владельцы эхолотов стали замечать нарушения в работе эхолотов – пропадания отражений, появление шумовых помех на экране, ослабление отраженных сигналов.
Главным источником таких помех является кавитация – нарушение непрерывности текущей жидкости. При движении правильно сконструированного судна в воде его подводная часть обтекается плавно. Если на корпусе имеются какие-либо выступающие части – фланец заборной или сливной трубы, заклепки, головки болтов и пр., вокруг них при движении начнут образовываться завихрения, т.е. поток станет турбулентным, а при достижении какой-то критической скорости начнут возникать наполненные паровоздушной смесью кавитационные пузырьки, переходящие в каверны. Воздушные пузырьки, вследствие малой плотности заполняющего их газа, отражают звуковые волны и частично или полностью маскируют пространство под судном.
Наиболее подвержены помехам преобразователи, устанавливаемые на транце: мало того, что они сами являются источником кавитации, они еще получают все пузырьки, образовавшиеся на корпусе судна. Но основным источником помех для транцевого преобразователя является высокооборотный гребной винт.
В наилучшем положении находятся преобразователи «In Hull» и «True Hull» при их правильном расположении в местах с плавным обтеканием. При установке преобразователя «True Hull» на скоростных судах его рабочая поверхность, во избежание образования на нем кавитации, не должна выступать из корпуса, но и не должна располагаться в углублении.
Чувствительность эхолота
Понятие «чувствительность» характеризует способность эхолота выделять слабые отраженные сигналы на фоне акустических помех и шумов приемника. Величина чувствительности определяет возможность обнаружения мелких предметов на больших глубинах.
Приемник эхолота работает в очень широком диапазоне напряжений – ведь мощность принимаемых отраженных сигналов пропорциональна четвертой степени глубины. Поэтому он должен хорошо принимать слабые сигналы от мелких предметов как на максимальных глубинах, так и на предельно малых.
Необходимость работы в столь широком диапазоне уровней сигналов приводит к определенному противоречию в выборе чувствительности. С одной стороны, высокая чувствительность позволяет получать большое количество информации о различных объектах на предельно больших глубинах, но, вместе с тем, на малых глубинах такой эхолот будет принимать сигналы вне главного луча боковыми лепестками диаграммы направленности преобразователя.
Для устранения этого противоречия в эхолотах имеется регулировка чувствительности, которая в недалеком прошлом осуществлялась вручную. В современных эхолотах в дополнение к ручной регулировке имеется автоматическая.
Автоматическая регулировка устанавливает чувствительность по уровню отражений от дна так, чтобы на экране были отметки от рыбы и дна. Изменение чувствительности осуществляется автоматически в соответствии с изменениями глубины и состояния воды. Автоматический режим обеспечивает нормальную работу эхолота практически во всех ситуациях, поэтому он, в основном, и используется. При необходимости, этот режим может быть отключен, и регулировка будет осуществляться вручную.
Установка эхолота
После того как мы познакомились с принципом работы, устройством и характеристиками рыбопоисковых эхолотов, можно перейти к самой интересной части – знакомству с основами их эксплуатации. Поскольку изделия различных производителей незначительно отличаются друг от друга, за основу возьмем какую-либо распространенную модель, например, из серии эхолотов Garmin.
В данном разделе мы рассмотрим способы установки преобразователей и методы общения с эхолотом в процессе работы.
Установка излучателя
Правильная установка преобразователя является ключевой по важности операцией для обеспечения эффективной работы эхолота. Не следует устанавливать преобразователь позади заклепок, ребер, отверстий для забора воды или других неровностей на днище, которые могут создавать облака воздушных пузырьков и образовывать завихрения воды. Очень важно, чтобы преобразователь работал в спокойном потоке воды, иначе его возможности будут серьезно ухудшены.
Установка преобразователя на транец Транцевый преобразователь поставляется со специальным кронштейном для крепления к транцу. Кронштейн обычно имеет подпружиненный элемент, позволяющий преобразователю откидываться назад при наезде на какое-либо препятствие.
Основные принципы установки преобразователя показаны на рис. 6.

Рис. 6. Принцип установки преобразователя на транец
Установка преобразователя «In Hull» в корпусе
На стеклопластиковых судах для удобства эксплуатации можно устанавливать преобразователь в корпусе. Некоторые фирмы выпускают для этого специальные приборы, но с таким же успехом внутри корпуса можно установить обычный транцевый преобразователь. На многих пластиковых малых судах имеются специально приготовленные места для установки преобразователя.
Часто пластиковые корпуса имеют в своей структуре усиливающие элементы или пористые наполнители, препятствующие распространению ультразвука, поэтому прежде чем приклеивать преобразователь, проверьте это место следующим образом. Налейте в трюм, в место предполагаемой установки, некоторое количество воды, опустите в нее рабочую поверхность преобразователя и проверьте наличие на экране изображения подводного пространства. Сравните полученные значения глубины с реальными. Если разницы нет, то смело можете приклеивать преобразователь в это место.
Установка преобразователя «True Hull» в корпус Преобразователи «True Hull» устанавливают в высверленное в днище судна отверстие. Наружные и внутренние поверхности корпуса около отверстия покрываются слоем герметика, преобразователь с кабелем вставляется в отверстие и крепится через шайбу гайкой.
Преобразователи должны крепиться горизонтально перед винтом, килем и любыми выступами, которые могут быть причиной образования пузырьков воздуха. Если поверхность днища наклонная, преобразователь ставят с помощью горизонтирующих прокладок. Для больших бронзовых преобразователей выпускаются специальные обтекатели (рис. 7).

Рис. 7. Обтекатель для бронзового преобразователя
Эксплуатация эхолота
Отображаемая информация
Современный рыбопоисковый эхолот может получать и отображать самую разнообразную информацию о состоянии водной толщи и находящихся в ней объектах. Ниже перечислено то, что можно увидеть на экране дисплея (рис. 8).

Рис. 8. Изображение на экране эхолота
Управление эхолотом
Управление эхолотом осуществляется с помощью нескольких кнопок и экранных меню (рис. 9).

Рис. 9. Органы управления эхолота

Рис. 10. Панель управления и информация на экране
В верхнем левом углу экрана (рис. 10) можно видеть панель управления и различную информацию, в том числе глубину напряжение источника питания, температуру воды и скорость движения (при наличии соответствующих датчиков). В правой части экрана находится линейка шкалы глубин и функция «Луч». Символы сигнализации или системных сообщений представлены под изображением дна.
Теперь познакомимся с основным опциями экрана, с помощью которых осуществляется управление работой эхолота.
Панель управления
Это меню (рис. 11), дающее доступ к установкам, наиболее часто используемым в работе эхолота – к шкале глубин (Depth Range), масштабирования (Zoom) и чувствительности/усиления (Gain). Для этого на панели управления кнопками-стрелками < и >»передвигают курсор (белое поле) на нужную опцию. Выбор желаемой установки осуществляется стрелками «^и V».
Шкала глубин (Range) Шкала глубин (рис. 11) необходима для установки и просмотра на экране определенных участков толщи воды. Установка осуществляется курсором на раскрывающемся в левой части экрана меню глубин. Впрочем, прибор может автоматически выбирать шкалу, соответствующую глубине под судном в настоящий момент и изменять ее при движении судна – для этого достаточно установить курсор шкалы глубин на «Auto» и нажать «Enter».
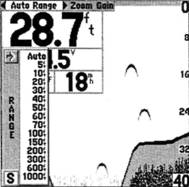
Рис. 11. Меню панели управления
Масштаб (Zoom)
Функция «Масштаб» используется для выбора степени увеличения изображения отдельных интересующих участков на экране. Функция «Масштаб» позволяет увеличить все объекты в выбранном диапазоне глубин. Величина масштаба устанавливается в раскрывающемся меню. После установки экран делится на две части, на одной из которых ведется полномасштабный просмотр, а в другом – только выбранный участок в установленном масштабе (рис. 12).
Усиление, чувствительность (Gain) Ранее уже говорилось о влиянии чувствительности на эффективность работы эхолота. Высокая чувствительность позволяет получать большое количество деталей, но может привести к появлению шумов в виде засветки экрана и к приему отражений от предметов, расположенных в стороне от судна боковыми лепестками, Поэтому во всех приборах имеются органы для ее регулировки. В данном приборе чувствительность устанавливается стрелками в раскрывающемся окне GAIN (рис. 13).

Рис. 12. Функция «масштаб» на экране эхолота

Рис. 13 . Установка чувствительности эхолота
По умолчанию в эхолоте устанавливается нормальный уровень чувствительности, соответствующий положению Normal Gain на шкале в левой части экрана. При необходимости получить большее количество деталей следует увеличивать чувствительность, выбирая на шкале положительные значения настроек, при необходимости уменьшения чувствительности следует выбирать отрицательные значения.
Меню установок содержит также настройки эхолота, которые не требуют частых регулировок. Сюда входят настройки «Изображение»(Chart), «Инструменты» (Tools), «Цифры» (Nambers), «Сигнализация» (Alarm), «Системные настройки» (System), «Калибровка» (Calibr), «Единицы измерения» (Units) и «Управление памятью» (Memory), «Символ рыбы» (Fish Symbols). Если эхолот двухчастотный, то в состав меню войдет еще и установка частоты. Рассмотрим некоторые из них.
Изображение (Chart)
Данная настройка устанавливает скорость прокрутки, т.е. скорость обновления информации на экране. Осуществляется это с помощью функции Scroll Speed, позволяющей выбрать одну из трех скоростей – быструю (Fast), среднюю (Medium) и медленную (Slow) в соответствии с условиями работы.
Частота (Frequency)
Эта позиция меню предназначена для выбора частоты излучения – высокой частоты 200 кГц (устанавливается по умолчанию), низкой частоты 50 кГц или обоих сразу.
Символы рыбы (FishSymbols)
Эта установка позволяет пользователю выбирать отображать подводные объекты в виде символов-рыбок, либо в виде отраженных сигналов (дуг). Выбор осуществляется в раскрывающемся меню с символами рыб и позицией «Off» – выключить. В этой позиции на экран эхолота будут выводиться все принятые отраженные сигналы. При выборе любого символа при обнаружении любого объекта на экране будут появляться только символы рыб. Если эхолот будет работать в двухчастотном режиме, то рыбы, облучаемые узким лучом, будут черными, а облучаемые только широким лучом – белыми.
Белая линия (Whiteline)
Функция Whiteline позволяет определять структуру слоев породы, составляющих дно. Если при выключенной функции дно отображается черным цветом, то при включении этой функции дно будет рисоваться в соответствии с плотностью его слоев оттенками черного и серого цветов.
Инструменты (Tools)
Функция Tools имеет четыре набора инструментов – «Линия глубины» (Depth Line), «Луч» (Flasher), «Имитатор» (Simulator) и «Шумоподавитель» (Noise Reject), помогающих распознавать подводные объекты.
Инструмент Depth Line используется для определения глубины до объекта или для его выделения. Представляет горизонтальную линию, управляемую кнопками-стрелками. Положение линии на оси глубин в цифровой форме отображается в информационном окне на экране.
Активированный инструмент «Flasher» (Луч) создает изображение на вертикальной полосе. Этот инструмент позволяет яснее представлять на экране детали водной толщи и поверхности дна.
Функция «Noise Reject» (Шумоподавление) позволяет удалять с экрана нежелательные помехи. Установка режима шумоподавления может осуществляться автоматически и вручную. Следует иметь в виду, что при высоких уровнях подавления может быть потеряна часть малых объектов.
Инструмент «Simulator» используют для изучения эхолота и отработки навыков работы с ним.
Сигнализация об обнаружении рыбы (Alarm) Эхолот может подавать звуковые сигналы об обнаружении рыбы. Сигнализация может быть настроена на обнаружение различных по размеру рыб (маленькая, средняя, большая и в различных вариантах). Сигнализация будет работать независимо от включения функции Fish Symbols.
Помимо этого эхолот может подавать сигналы тревоги при изменении измеряемой глубины меньше заданного значения или при превышении его.
Изображение на экране
Для работы с эхолотом очень важно понимать, что мы можем реально видеть на экране и не ожидать большего, чем он может дать. Чтобы разобраться во всем этом, вспомним, с чего мы начали наше знакомство с эхолокацией – со способа излучения и приема.
Как уже кратко отмечалось в главе «Устройство и характеристика эхолотов», преобразователь эхолота излучает звуковые волны в направлении дна. Область, покрываемая излучением, условно описывается конусом с вершиной в излучателе и зависит от величины этого угла и глубины водоема. На рисунке 5 показаны сечения конусов плоскостями на разных глубинах для преобразователей с частотой 50 кГц и углом конуса 20°, и с частотой 200 кГц и углом конуса 10°. При использовании таких преобразователей поверхности покрытия на глубине 9 м будут представлять соответственно круг диаметром 6 и 1,8 м.
Для пользователя очень важно понимать, что в соответствии с принципом действия эхолот измеряет только одну координату – глубину, и поэтому не может давать пространственную картину водного пространства в конусе излучения (рис. 14). Прибор не может определить, где в пределах конуса находится рыба, где водоросли, а только лишь сообщает, что они находятся на одной глубине. Особенно важно помнить об этом при использовании преобразователей с широкими диаграммами направленности.
Распознавание типа дна
Эхолот может распознавать тип дна под ним – твердый грунт, ил, водоросли. Твердые породы лучше отражают звуковые волны, чем мягкий ил или песок. Слой твердого дна будет показан на экране более широкой полосой, чем у мягкого дна.
Для улучшения распознавания сильных и слабых сигналов в эхолотах существует функция White Line – «Белая линия» (в ряде случаев используется термин «серая линия»). При включении этой функции дно отображается оттенками черного и серого цвета. Например, ил на дне дает слабый отраженный сигнал, который отображается на экране с тонкой серой окантовкой, а изображение твердого дна изображается с широкой серой окантовкой (рис. 15).

Рис. 14. Картина в конусе излучения

Рис. 15. Изображение дна на экране при использовании функции «белая линия»
Функция «Белая линия» позволяет определить структуру слоев пород, составляющих дно. Получая сведения о сравнительной плотности этих слоев, можно точнее определить их структуру (рис. 16).
Наблюдение за рыбой
При правильно установленном преобразователе и должной настройке эхолота рыба будет отображаться на экране в виде дуг (рис. 17). Такое изображение получается из-за изменения расстояния до рыбы при ее прохождении через конус излучения. При пересечении границы конуса расстояние от нее до преобразователя будет максимальным.

Рис. 16. Структура дна при использовании функции «белая линия»
По мере подходу к оси конуса расстояние будет уменьшаться, что будет отображаться на экране. После прохождения оси расстояние до рыбы начнет увеличиваться, в результате чего на движущейся развертке экрана появится изображение дуги.
Размер и кривизна дуги зависит от ширины диаграммы направленности преобразователя. Чем шире конус излучения, тем более ярко выражена дуга.
При вхождении рыбы в конус излучения ее изображение будет тонким из-за ослабления мощности на краях диаграммы. При ее приближении к центру толщина дуги будет увеличиваться и, в центре диаграммы станет наибольшей. При выходе рыбы из зоны излучения картина будет изменяться в обратном порядке – уменьшаться.
Если рыба проходит по краю конуса, то дуги может не получиться или она будет очень небольшой. Наличие в эхолотах функции Fish Symbols позволяет отображать принятые сигналы в виде символов – «рыбок» различных размеров. Эта функция может использоваться только при работе эхолота в автоматическом режиме. При включенной функции Fish Symbols отображает только символы, не выводя на экран никакие другие отметки.

Рис. 17. Изображение рыбы в виде дуг
Ряд моделей рыбопоисковых эхолотов имеют возможность подключения датчиков бокового обзора. В этом случае они могут вести обнаружение рыбы не только под судном, но и по обеим сторонам от него.
Что дает эхолот рыбаку
Ответ на этот вопрос, казалось бы, весьма прост – эхолот ищет и находит рыбу, и это является его основным предназначением. Однако однозначность этого ответа может казаться абсолютно справедливой только начинающему рыболову. Каждый мало-мальски грамотный рыбак знает, что рыба не распределяется равномерно по пространству водоемов, а собирается в определенных местах, определяемых рельефом дна, резкими изменениями глубин и даже перепадами температур между слоями воды. Интерес могут представлять коряги, камни, ямы, растительность. Иными словами, рыба не только ищет, где глубже, но и где ей лучше ночевать, охотиться, маскироваться, кормиться. Поэтому первостепенная задача эхолота – это определение глубин водоема и изучение рельефа дна.
Результаты измерения глубины на экране эхолота осуществляются двумя способами – в графической форме (отображение рельефа дна на фоне шкалы глубин) и в цифровой форме в углу экрана. Следует иметь в виду, что при работе эхолота на предельно малых глубинах могут возникнуть проблемы с измерениями, связанными, в первую очередь, с наличием у любого эхолота «мертвой зоны», а также наличием сильных отражений от находящихся вне конуса излучения предметов и участков дна, облучаемых боковыми лепестками диаграммы. Такие помехи особенно заметны в эхолотах, не имеющих автоматической регулировки усиления.
Отображение рельефа дна
При измерении глубины вдоль правой границы экрана отображается в виде точки текущее значение измеряемой глубины. Для обеспечения возможности наблюдения за рельефом эта точка сохраняется на экране и сдвигается по нему справа налево на один шаг, а ее место занимает новая точка, соответствующая очередному отсчету глубины. Затем происходит следующий сдвиг – так запоминается каждая последующая точка через промежутки времени, равные периоду следования зондирующих ультразвуковых импульсов. В результате на экране появляется линия, являющаяся отображением рельефа дна. Следует особо отметить, что полученная линия отображает рельеф на пути, уже пройденным судном, что следует учитывать при выборе позиции для ловли.
Следует также иметь в виду, что текущее значение глубины под судном отображается на шкале на правой стороне экрана. Это значение повторяется так же на экране и в цифровой форме.
Если судно неподвижно, то глубина под ним не меняется и, следовательно, линия будет прямой и горизонтальной (рис. 18).
При движении судна над неровным дном отметка глубины в правом углу экрана будет менять свое положение соответственно изменению глубины под датчиком эхолота. При уменьшении глубины каждая последующая точка будет располагаться выше предыдущей, при увеличении глубины – ниже предыдущей (рис. 19). В результате на экране появляется линия, повторяющая рельеф дна на пути следования судна.

Рис. 18. Изображение на экране при неподвижном судне
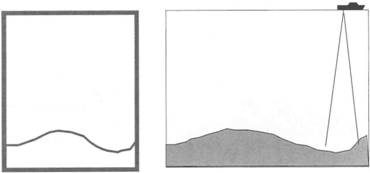
Рис. 19. Изображение рельефа дна на экране при движении судна
Для рыбака наибольший интерес представляют самые различные неоднородности рельефа дна, так как на них чаще всего ловиться рыба. Это могут быть песчаные «косы», намываемые течением с внутренней стороны на повороте реки (рис. 20), и резкие переходы на подмытых течением внешних берегах (рис. 21). Места с такими резкими переходами должны интересовать рыбака, т.к. на них может находиться крупная рыба.

Рис. 20. Изображение на экране песчаной косы

Рис. 21. Изображение на экране внешнего берега при повороте реки
На озерах Карелии и Белом море часто встречаются подводные скалы самых разных размеров – небольшие «луды и корги» (рис. 22), и обширные галечные либо каменистые «банки» – любимые места крупной хищной рыбы. Недаром профессиональный лов рыбы в море ведется, в основном, на банках. Автору этих строк как-то довелось на одной луде в Белом море в компании двух приятелей за каких-то 20 минут наловить на голые крючки ведро трески.

Рис. 22. Изображение на экране подводных скал

Рис. 23. Изображение на экране подводных ям
Еще один предмет поиска для рыбака – это ямы, в которых может находиться крупная хищная рыба (рис. 23).
Вообще, любые резкие изменения глубин привлекают рыбу и позволяют надеяться на ее обнаружение на данных участках. При ведении поиска с использованием эхолота следует искать участки, отличающиеся от преобладающего рельефа дна. На мелких участках нужно искать впадины и ямы, на глубоких участках – гребни, косы, луды, перекаты, на изрезанных участках – ровные площадки.

Рис. 24. Изображение на экране грунтов различной плотности
Еще один важный показатель, позволяющий определить перспективность того или иного участка для лова рыбы – структура дна. Структура дна говорит о том, из каких грунтов состоит дно – глина, песок, ил, скала или галька. С помощью эхолота точно распознать тип грунта невозможно, можно только различать его по плотности. На экране эхолота плотный грунт (глина, камень) отображается светлым тоном, а мягкие грунты – темным (рис. 24). По наличию ила и растительности можно судить о том, какая рыба может водиться на данном участке.
Большой интерес для рыбака представляют коряги или затонувшие стволы деревьев, около которых с большой степенью вероятности можно обнаружить рыбу. Они отличаются по плотности от грунта и обычно хорошо видны на экране эхолота (рис. 25). Такие предметы целесообразно запоминать в памяти приемника GPS, т.к. их повторное обнаружение осуществить намного сложнее, чем косу или перекат. То же самое относится и к другим относительно малоразмерным объектам – лудам, ямам и т.п.

Рис. 25. Изображение на экране коряги или ствола дерева
Отображение рыбы
Ранее уже упоминалось, что на экране эхолота рыба отображается в виде дуг. Это происходит из-за того, что при прохождении рыбы через конус излучения расстояние от нее до преобразователя меняется – сначала оно уменьшается, а затем увеличивается снова. Поскольку по мере удаления от оси диаграммы направленности преобразователя энергия излучения убывает, то при прохождении рыбы через облучаемую зону толщина дуги изменяется – сначала она увеличивается, затем снова уменьшается. Размер дуги зависит, прежде всего, от ширины конуса излучения – чем шире конус, тем длиннее дуга (рис. 26), а также от скорости движения рыбы относительно судна. Чем выше эта скорость, тем слабее и бледнее эта дуга. Поэтому, при поиске рыбы с катера на ходу, получив на экране слабые дуги, стоит вернуться и на малой скорости пройти это место.
На форму дуги могут влиять и характерные особенности рыбы, позволяя, при наличии опыта, с некоторой вероятностью, определять вид рыбы, хотя не все опытные рыбаки разделяют эту точку зрения. Возможно, и проводились какие-либо теоретические и экспериментальные работы по распознаванию видов рыб с использованием эхолотов в интересах промыслового рыболовства, но мне такие материалы не встречались. Да и задачи обнаружения и распознавания профессионала и рыбака-любителя совершенно разные.

Рис. 26. Принцип образования дуги
В некоторых моделях эхолотов с цветным экраном (например, в эхолотах Garmin) отраженные сигналы окрашиваются различным цветом в зависимости от уровня их мощности. Красным цветом обозначаются самые мощные сигналы, оранжевым – сильные, желтым – средние, зеленым – слабые и синим – самые слабые. В монохромных версиях тех же эхолотов уровни принимаемых сигналов обозначаются Оттенками серого цвета – чем сильнее сигналы, тем темнее его отметка, и наоборот.
Обобщая имеющиеся в прессе материалы по распознаванию рыбы и результаты опроса среди пользователей эхолотов, можно сделать следующие предположения.
Многие представляют щуку как смещенную в один конец толстую дугу, сома – как одинокую толстую дугу. Некоторые виды рыб изображаются на экране эхолота в виде нескольких тонких дуг – например, судак или лещ. Однако, при отсутствии каких-либо экспериментальных данных достоверность этих оценок невелика.
Поскольку однозначно распознать рыбу невозможно, то для повышения достоверности оценки необходимо одновременно сопоставлять полученную дугу с рельефом и структурой дна, характерным для обитания тех или иных видов рыб. Такая работа требует большого опыта работы с эхолотом, понимания характерных особенностей, повадок и привычек различных рыб.
Для облегчения обнаружения и распознавания для рыбаков с малым опытом в большинстве любительских эхолотов имеется функция отображения обнаруженной рыбы в виде символов – «рыбок» различных размеров. Они формируются путем анализа по определенным алгоритмам мощности отраженных от подводных объектов сигналов. В большинстве эхолотов используются три градации размеров – мелкая, средняя и крупная, обозначаемые соответствующими символами (рис. 27).

Рис. 27. Отображение эхо-сигналов в виде символов – «рыбок»

Рис. 28. Изображение символов на экране двухлучевых эхолотов
Однако не следует считать, что, включив режим автоматического распознавания, можно будет получить от эхолота достоверную информацию о размере рыбы – автомат, он и есть автомат, вырабатывающий по уровню мощности отраженных сигналов символы установленных размеров. Уровень мощности отраженных сигналов зависит от множества факторов – от степени загрязнения воды, от наличия в ней планктона, растительности, температурных перепадов, которые эхолот не учитывает при анализе принимаемых сигналов. Помимо этого, прибор не различает всех тонких нюансов отраженных сигналов, которые легко распознает глаз человека, поэтому он может присваивать символы рыб дрейфующим в воде топлякам, воздушным пузырям, водорослям.
Символы в монохромных эхолотах обычно окрашены в черный цвет. В двухлучевых эхолотах символы рыб, полученные узким лучом, будут закрашены, а полученные широким лучом – будут обозначены в виде контура (рис. 28).
Еще одна проблема автоматического распознавания заключается в невозможности определения размера рыб, обозначаемых самым крупным символом – он может быть присвоен и килограммовому окуню, и сому весом несколько десятков килограммов.
Для распознавания крупных экземпляров рыб в некоторых современных эхолотах имеется функция реального сканирования. Приборы, оснащенные такой функцией, выдают на экран изображение рыбы, пропорционально ее истинному размеру (рис. 29). Имея шкалу глубин, можно достаточно легко определить размер рыбы.
В заключение рассуждений на тему автоматического распознавания следует отметить, что самым лучшим устройством для этого пока еще является человеческий глаз и мозг – недаром в профессиональных эхолотах на экран выводятся только отображения реальных сигналов.
Масштабирование
Масштабирование является весьма эффективным приемом для наблюдения за рыбой. Сущность масштабирования заключается в увеличении (растягивании) отдельных выделенных по глубине участков в несколько раз обычно в два и в четыре раза. Для осуществления этой операции в эхолотах существует функция «ZOOM» (масштаб). Картину с измененным масштабом можно рассматривать на полном экране, а также в режиме с разделенным экраном, когда на одной половине экрана будет полномасштабное изображение, а на второй половине – увеличенный вдвое или в четыре раза выбранный участок изображения (рис. 30), что очень удобно для просмотра интересующих мест – покрытых растительностью, коряг, ям.

Рис. 29. Изображение символов на экране эхолотов, имеющих функцию реального сканирования
В эхолотах существует еще одна интересная функция, которую так же можно отнести к автоматическому распознаванию – функция «Alarm» (сигнализация), позволяющая подавать звуковые сигналы при наступлении каких-то заранее установленных событий. Такими событиями могут быть:
– Появление на экране изображения рыбы определенного размера;
– При вхождении в район со слишком малой глубиной, либо со слишком большой;
При выходе из заданного диапазона глубин («Дрейф»).

Рис. 30. Изменение размера разделенного экрана эхолота
Для более внимательного изучения изображения отраженных сигналов в некоторых моделях эхолотов существует функция остановки изображений («Режим паузы»). В этом режиме активизируется стрелка-курсор, который можно перемещать по остановившейся картинке и отмечать путевые точки (если к эхолоту подключен приемник GPS), а также глубину и координаты отмеченных курсором отметок отраженных сигналов (рис. 31). Функция паузы облегчает поиск таких объектов, как сваи, камни, коряги, которые могут оказаться полезными при выборе места для рыбалки.

Рис. 31. (верхний) – при перемещении курсора в верхней части экрана будут показаны значения глубины, температуры воды и местоположение (при их наличии); (нижний) – вы можете передать подводную путевую точку в GPS приемник
Пока дисплей находится в режиме паузы, прибор продолжает обновлять показания глубины, однако новые данные не могут быть показаны на экране до тех пор, пока не будет отключен этот режим.
Эхолоты для зимней рыбалки
Эхолоты для зимней рыбалки должны работать в весьма специфических условиях – на морозе, при ограниченных возможностях источников электропитания. Помимо этого, они должны осуществлять те же задачи, что и обычные эхолоты – поиск и обнаружение рыбы в водоеме, но только со значительно меньшими возможностями перемещения по его пространству, быть экономичными и работать от встроенных источников питания ведь не тащить же на водоем аккумулятор – и, главное, не замерзать при низких температурах.
Существует несколько принципиально отличающихся приборов, речь о которых пойдет ниже.
Глубиномеры
Самые простые и дешевые приборы, позволяющие определять глубину и температуру воды в лунке.

Рис. 32. Глубиномеры для зимней рыбалки
Работа с таким глубиномером очень проста – достаточно опустить его в лунку и нажать кнопку, и на экране появятся значение глубины и температуры воды.
Глубиномеры могут определять глубину не только из лунки, но и через лед. Для этого достаточно очистить лед от снега, налить на это место немного воды, установить на это место преобразователь и дать ему примерзнуть. Перед установкой преобразователя необходимо убедиться, что во льду в месте крепления нет пузырьков воздух, т.к. они могут ухудшать прохождение сигналов через лед.
Прибор состоит из двух частей – дисплея и преобразователя (рис. 32, 33). Для работы на морозе в дисплее используются незамерзающие LED экраны, хотя и встречаются приборы с LCD экранами – в последнем случае их необходимо защищать от холода.

Рис. 33.
Глубиномеры полностью герметичны и могут работать даже при погружении в воду. Питание приборов осуществляется от встроенных батарей АА аналогичных по размеру аккумуляторов.
Некоторые глубиномеры имеют функцию обнаружения рыбы, но пот цифровому дисплею очень сложно определить, рыба ли это, дно или камень.
Тубусные эхолоты
Для поиска и обнаружения рыбы из лунки компанией Bottm Line производится серия специальных эхолотов с горизонтальным обзором (рис. 34, 35). Сканирование осуществляется узким лучом с помощью преобразователя, расположенного горизонтально на специальной, опускаемой в воду штанге («ноге»).
Самые простые эхолоты могут обнаруживать и отображать на экране рыбу только в луче преобразователя в направлении излучения. Наиболее сложные могут осуществлять круговое сканирование с отображением результатов сканирования на экране.

Рис. 34. Тубусные эхолоты с боковым обзором

Рис. 35.
Эхолоты реального времени
Наиболее интересные и эффективные из зимних эхолотов, т.н. флэшеры, позволяющие с помощью специальных многолучевых преобразователей производить круговой обзор в режиме реального времени. Отображение результатов сканирования осуществляется на круглом, как у гидролокатора, цветном экране (рис. 36) одновременно со всех направлений. При этом обнаруженные объекты, в зависимости от их плотности, окрашиваются разными цветами – самые плотные – красным цветом, средней плотности – оранжевым и наименее плотные – зеленым.
Эхолоты данного класса оснащены всеми, присущими традиционным эхолотам, основными функциями – ручным и автоматическим масштабированием, функцией выделения дна, автоматической регулировкой усиления и обладает большими возможностями по поиску и обнаружению рыбы. Он может быть использован не только для зимней рыбалки, но и успешно применяться для поиска рыбы с лодки или катера.

Рис. 36. Изображение на экране эхолота реального времени
ЭХОЛОТЫ ПЕРЕДНЕГО ОБЗОРА
Общие сведения
Эхолоты переднего обзора или, как принято их называть, «сонары» или, по-русски, «гидролокаторы», появились на малом флоте совсем недавно, каких-нибудь лет 10 назад. Детище военно-промышленного комплекса, они вобрали в себя все последние достижения гидроакустики и самые современные технологии, применявшиеся ранее на военных флотах для обнаружения мин и подводных лодок.
Основное назначение сонаров – обзор подводного пространства перед судном и обнаружение препятствий перед ним. Существуют два метода обзора подводного пространства – последовательный и параллельный. При последовательном методе обзор ведется в вертикальной либо в горизонтальной плоскости узким ультразвуковым лучом с последовательным перемещением луча в просматриваемом пространстве (рис. 37). Параллельный обзор ведется несколькими лучами одновременно, при этом изображение на экране (рис. 38) обновляется непрерывно, в реальном времени, что очень важно для высокоскоростных судов.
Основу эхолота переднего обзора составляет сложная фазированная гидроакустическая антенна, состоящая из нескольких одновременно работающих преобразователей. Формирование луча или нескольких лучей и управление ими осуществляется за счет изменения фазовых сдвигов между элементами антенны.
По принципу обзора существуют два вида приборов – с вертикальным и с горизонтальным сканированием. В первом случае обзор ведется в вертикальной плоскости в секторе 90° от поверхности до дна. При таком виде сканирования на экране отображается профиль дна перед судном, подводные препятствия, косяки и отдельные экземпляры рыб (рис. 39). Дальность до препятствий или мелей определяется по шкале на экране. Шкала дальности и глубин может устанавливаться автоматически или вручную.

Рис. 37. Последовательный обзор

Рис. 38. Параллельный обзор
Сонары с горизонтальным сканированием осуществляют обзор по горизонтали в секторе ±45° или ±90° (рис. 40). На экране в этом случае отображаются отметки мелей и других подводных препятствий, находящихся перед судном, позволяющие судоводителю ориентироваться при плавании в сложной навигационной обстановке.

Рис. 39. Вертикальный обзор

Рис. 40. Горизонтальный обзор
В настоящее время производятся эхолоты с одним видом обзора, либо с двумя одновременно.
В этом случае они оснащаются либо двумя преобразователями, либо одним преобразователем с двумя антеннами в одном корпусе.
Помимо основного режима, в сонарах имеется дополнительный режим вертикального обзора, в котором они могут использоваться как обычные рыбопоисковые эхолоты, что расширяет возможности приборов. Работа может вестись как в одном из режимов, так сразу в двух с разделением экрана (рис. 41).
Все перечисленные сонары содержат излучатель для установки на транец либо на днище судна, и дисплей с монохромным или цветным жидкокристаллическим дисплеем в водостойком исполнении, позволяющим пользоваться им на открытом мостике катера либо на открытом мостике. Приборы имеют набор функций, облегчающих работу с ними – сигнализацию о мелях или глубинах и зонах, яркую подсветку экрана, встроенную память. Некоторые модели имеют возможность сопряжения с приемником GPS и датчиком скорости, а эхолоты с цветным экраном имеют вход для работы с видеокамерой.
В настоящее время эхолоты переднего обзора производят две компании – американская Interphase Tecnologies (эхолоты с последовательным обзором) и английская компания EchoPilot Marine Electronics (эхолоты с параллельным обзором).

Рис. 41. Изображение с разделением экрана
Особенности работы эхолотов
Эхолоты с последовательным обзором
Как отмечалось ранее, обзор подводного пространства в таких эхолотах осуществляется путем последовательного, шаг за шагом, перемещением сформированного преобразователем луча в вертикальной или горизонтальной плоскости. Луч движется дискретно, останавливаясь на каждой позиции на время, необходимое для получения достаточной для отображения информации. Полученное на каждом положении луча изображение сохраняется на время обзора всего сектора и обновляется при последующем сканировании. Поэтому процесс просмотра всего сектора обзора занимает достаточно большое время – 10–16 сек. Если для тихоходных судов этого вполне достаточно, то для высокоскоростных судов, проходящих за это время десятки и сотни метров, такие задержки неприемлемы.
Другим недостатком таких эхолотов, является недостаточный объем информации, определяемый ограниченным время нахождения луча на каждой отдельно взятой позиции. Поэтому эхолоты с последовательным обзором непригодны для распознавания подводных объектов и используются, в основном, в целях навигации.
Эхолоты с параллельным обзором
Параллельный, или, как его еще называют, непрерывный обзор предоставляет возможность получения большого объема информации в реальном времени.
Режим реального времени означает, что эхолот строит картину на экране не постепенно, а передает ее на экран одновременно от всех лучей, обновляя ее несколько раз в секунду. Поэтому на экране отображается изображение не в прошедшем, как в эхолотах с последовательным обзором, а в настоящем времени.
Вторым достоинством непрерывного обзора является большой объем информации, получаемой о подводных объектах, что дает уникальную возможность создавать эхолоты для распознавания объектов, характера и структуры дна, для построения трехмерных изображений, поиска и обнаружения рыбы. Непрерывный прием и отображения отраженных сигналов позволяет создавать более четкое и ясное изображение, чем при последовательном обзоре.
Для обработки такого большого объема информации в эхолотах используется мощный микропроцессор, способный выполнять до 100000 операций при каждом обновлении изображения на экране. Наличие такого мощного процессора в совокупности с наличием большого объема получаемой информации позволяет получать достаточно надежное распознавание подводных объектов.
Эхолоты переднего обзора всех типов предназначены, в первую очередь, для обнаружения препятствий перед судном, однако, они могут видеть также скопления и крупные экземпляры рыбы. За рубежом их используют на спортивной или профессиональной ловле в океане для поиска крупной рыбы.
Для примера рассмотрим самый маленький прибор с параллельным обзором из большого семейства EchoPilot – эхолот FLS Bronze (рис. 42).
Этот компактный эхолот с размерами 110 × 110 мм легко найдет себе место в любой лодке или впишется в приборную панель даже небольшого катера. Несмотря на свои небольшие размеры, он использует новейшую технологию горизонтальной эхолокации.
Максимальная дальность по горизонту составляет 100 м с возможностью выбора для удобства работы шкал дальности 20, 60 и 100 м. Символ судна всегда смещен на 8 метров от левой границы экрана, чтобы было удобнее оценивать расстояние впереди. Прибор оснащен предупредительной звуковой сигнализацией, срабатывающей при появлении препятствия в любой заданной зоне вплоть до 100 метров.
Жидкокристаллический дисплей с разрешающей способностью 126 × 62 пиксела изготовлен с применением новейших технологий и обеспечивает очень четкое изображение дна водоема. Подсветка экрана позволяет работать с ним даже ночью.
По сравнению с эхолотами с последовательным обзором, выдающим данные с запаздыванием 10– 15 сек, FLS Bronze, напротив, рассчитывает глубину непосредственно под днищем судна путем усреднения данных из первой трети экрана, что дает более точный результат.

Рис. 42. Эхолот с параллельным обзором
Интересной особенностью FLS Bronze является наличие «памяти глубины» – прибор показывает профиль дна не только впереди судна, но также и под днищем и позади судна. Управляется эхолот только двумя кнопками – одна используется для перелистывания и выбора пунктов меню, а другая для изменения выбранных установок. Диапазон дальности меняется автоматически либо вручную простым нажатием правой кнопки.
Эхолот имеет преобразователь только типа «сквозь корпус» (рис. 43), но, в отличие от других преобразователей, он имеет возможность убираться в специальную шахту при наличии опасности поломать его при движении по очень мелкому месту или подходу к берегу, а потом выдвигаться обратно.

Рис. 43. Преобразователи эхолота с параллельным обзором
источник: Валерий Александрович Евстратов Эхолоты и GPS-навигаторы. Радиоэлектроника для рыбака РЫБОПОИСКОВЫЕ ЭХОЛОТЫ



